Visualize Camera’s Pose Using Extrinsic Parameter by Plotting Pyramid Model on 3D Space
extrinsic2pyramid
Visualize Camera’s Pose Using Extrinsic Parameter by Plotting Pyramid Model on 3D Space
Intro
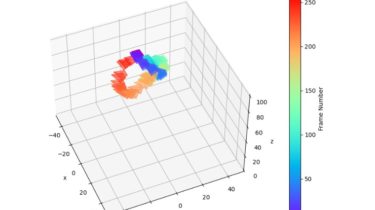
A very simple and straightforward module for visualizing camera pose on 3D space. This module just have a only utility, as like its name, to convert extrinsic camera parameter(transform matrix) to visual 3D square pyramid, the pyramid’s vertex not on the base side(square) is the camera’s focal point and The optical axis passes through the focal point and the center of the base.
Note that, this module do not contain any calibration algorithm. It’s just for visualizing calibrated parameter.
Requirements
numpy >= 1.2
numpy-quaternion
matplotlib
glob
Trouble Shooting
ImportError: numpy.core.multiarray failed to import
conda install -c conda-forge quaternion
Usage
To visualize extrinsic camera parameters, the only module you