RfD-Net: Point Scene Understanding by Semantic Instance Reconstruction
RfD-Net
Yinyu Nie, Ji Hou, Xiaoguang Han, Matthias Nießner
In CVPR, 2021.
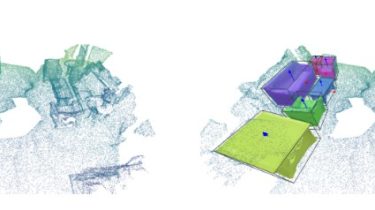
From an incomplete point cloud of a 3D scene (left), our method learns to jointly understand the 3D objects and reconstruct instance meshes as the output (right).
Install
-
This implementation uses Python 3.6, Pytorch1.7.1, cudatoolkit 11.0. We recommend to use conda to deploy the environment.
conda env create -f environment.yml conda activate rfdnetpip install -r requirements.txt -
Next, compile the external libraries by
python setup.py build_ext --inplace -
Install PointNet++ by
cd external/pointnet2_ops_lib pip install .
Demo
The pretrained model can be downloaded here. Put the pretrained model in the directory as below
out/pretrained_models/pretrained_weight.pth
A demo is illustrated