human-friendly CLI HTTP client for the API era
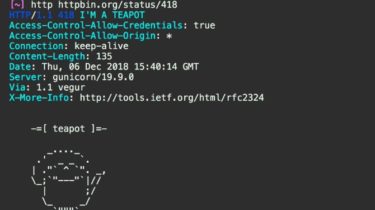
HTTPie HTTPie (pronounced aitch-tee-tee-pie) is a command-line HTTP client. Its goal is to make CLI interaction with web services as human-friendly as possible. HTTPie is designed for testing, debugging, and generally interacting with APIs & HTTP servers. The http & https commands allow for creating and sending arbitrary HTTP requests. They use simple and natural syntax and provide formatted and colorized output. GitHub https://github.com/httpie/httpie
Read more