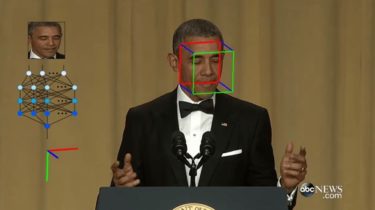
Official Pytorch implementation of 6DRepNet: 6D Rotation representation for unconstrained head pose estimation

Paper
Thorsten Hempel and Ahmed A. Abdelrahman and Ayoub Al-Hamadi, “6D Rotation Representation for Unconstrained Head Pose Estimation”, submitted to ICIP 2022. [ResearchGate][Arxiv]
Abstract
In this paper, we present a method for unconstrained end-to-end head pose estimation. We address the problem of ambiguous rotation labels by introducing the rotation matrix formalism for our ground truth data and propose a continuous 6D rotation matrix representation for efficient and robust direct regression. This way, our method can learn the full rotation appearance which is contrary to previous approaches that