Learning a Contact Potential Field to Model the Hand-Object Interaction
This repo contains model, demo, and test codes of our paper:
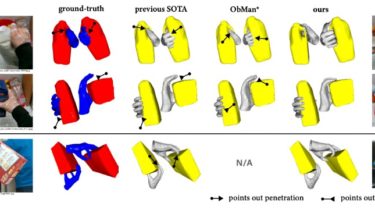
CPF: Learning a Contact Potential Field to Model the Hand-Object Interaction
Lixin Yang, Xinyu Zhan, Kailin Li, Wenqiang Xu, Jiefeng Li, Cewu Lu
ICCV 2021
1. Get our code:
$ git clone --recursive https://github.com/lixiny/CPF.git
$ cd CPF
2. Set up your new environment:
$ conda env create -f environment.yaml
$ conda activate cpf
3. Download asset files
Down load our [assets.zip] and unzip it as an assets/ folder.
Download the MANO model files from official MANO website, and put it into assets/mano/.
We currently only use the MANO_RIGHT.pkl
Now your assets/ folder should look like this:
assets/
├── anchor/
│ ├── anchor_mapping_path.pkl
│ ├── anchor_weight.txt
│ ├── face_vertex_idx.txt
│ └── merged_vertex_assignment.txt
├──