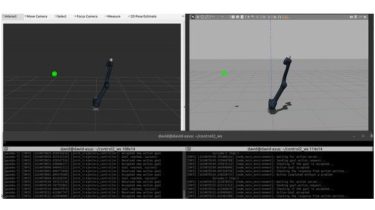
Doosan robotic arm, simulation, control, visualization in Gazebo and ROS2 for Reinforcement Learning
General Overview
This repository includes: First, how to simulate a 6DoF Robotic Arm from scratch using GAZEBO and ROS2. Second, it provides a custom Reinforcement Learning Environment where you can test the Robotic Arm with your RL algorithms. Finally, we test the simulation and environment with a reacher target task, using RL and the 6DoF Robotic Arm with a visual target point.

Prerequisites
| Library | Version (TESTED) |
|---|---|
| Ubuntu | 20.04 |
| ROS2 | Foxy |
| ros2_control | link |
| gazebo_ros2_control | link |
How to run this Repository
In the following links you can find a step-by-step instruction section to run this repository and simulate the robotic arm:
-
Simulation