Automatically calibrate RGBD cameras with PyTorch
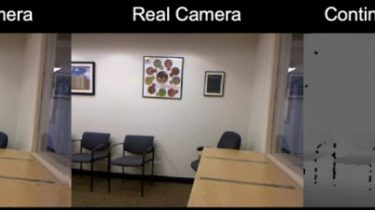
Automatically calibrate RGBD cameras with PyTorch. The intrinsics and extrinsics of the camera pair are optimized based on photometric consistency after projecting the ToF camera into the color camera. I tested on semi-rectified color and Kinect continuous wave ToF cameras from the NYU Depth V2 dataset. Related work using photometric consistency as a loss signal: LSD-SLAM, KinectFusion, CVPR 2017, ICCV 2019, ICCV 2021.


