Automatic Calibration for Non-repetitive Scanning Solid-State LiDAR and Camera Systems

ACSC
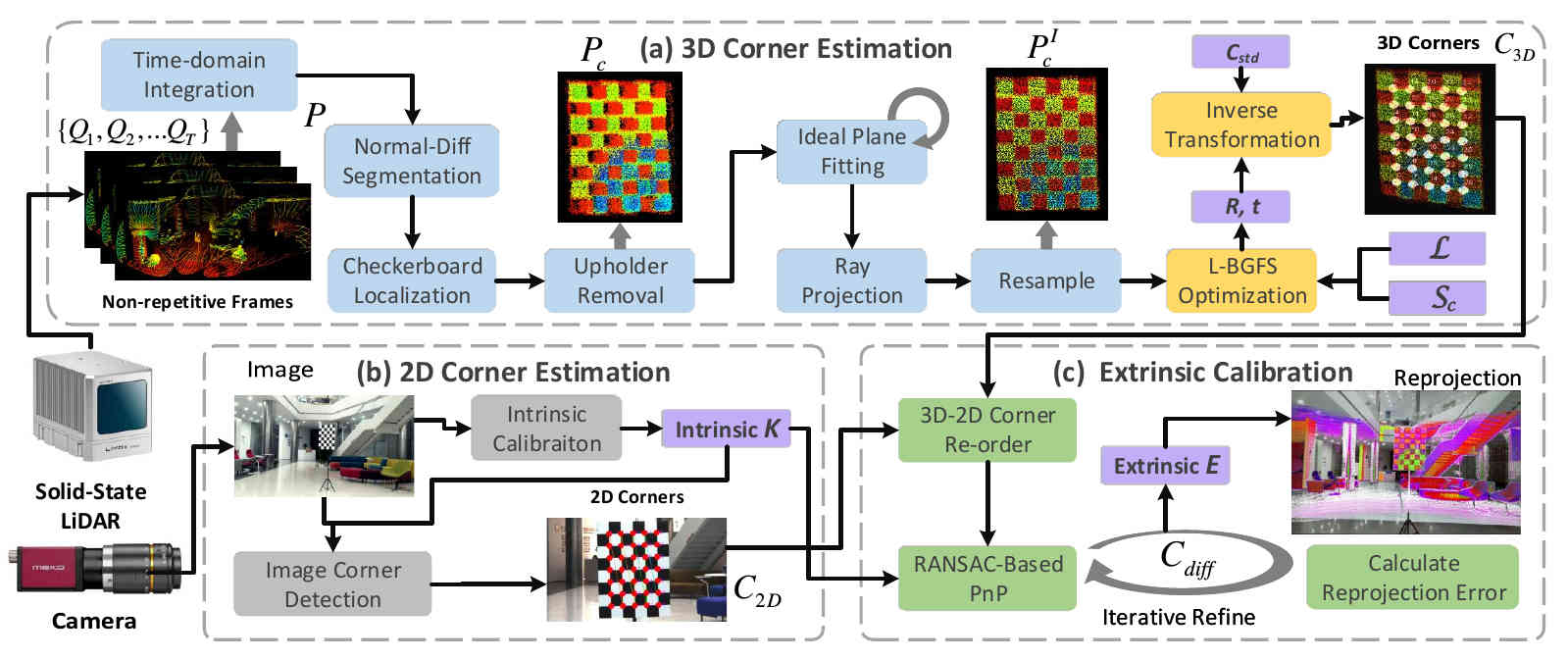
Automatic extrinsic calibration for non-repetitive scanning solid-state LiDAR and camera systems.
System Architecture
1. Dependency
Tested with Ubuntu 16.04 64-bit and Ubuntu 18.04 64-bit.
-
ROS (tested with kinetic / melodic)
-
Eigen 3.2.5
-
PCL 1.8
-
python 2.X / 3.X
-
opencv-python (>= 4.0)
-
scipy
-
scikit-learn
-
transforms3d
-
pyyaml
-
mayavi (optional, for debug and visualization only)
2. Preparation
2.1 Download and installation
Use the following commands to download this repo.
Notice: the SUBMODULE should also be cloned.
git clone --recurse-submodules https://github.com/HViktorTsoi/ACSC
Compile and install the normal-diff segmentation extension.
cd /path/to/your/ACSC/segmentation
python setup.py install
We