Deep Reinforcement Learning with pytorch and visdom
- Sample testings of trained agents (DQN on Breakout, A3C on Pong, DoubleDQN on CartPole, continuous A3C on InvertedPendulum(MuJoCo)):
-
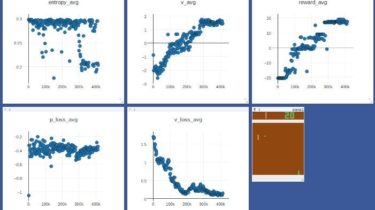
Sample on-line plotting while training an A3C agent on Pong (with 16 learner processes):

-
Sample loggings while training a DQN agent on CartPole (we use
WARNINGas the logging level currently to get rid of theINFOprintouts from visdom):