Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds
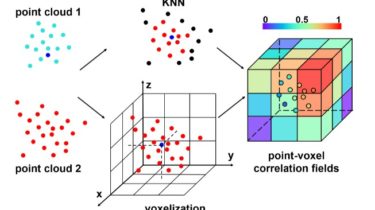
This repository contains the PyTorch implementation for paper “PV-RAFT: Point-Voxel Correlation Fields for Scene Flow Estimation of Point Clouds” (CVPR 2021)[arXiv]
Installation
Prerequisites
- Python 3.8
- PyTorch 1.8
- torch-scatter
- CUDA 10.2
- RTX 2080 Ti
- tqdm, tensorboard, scipy, imageio, png
conda create -n pvraft python=3.8
conda activate pvraft
conda install pytorch torchvision torchaudio cudatoolkit=10.2 -c pytorch
conda install tqdm tensorboard scipy imageio
pip install pypng
pip install torch-scatter -f https://pytorch-geometric.com/whl/torch-1.8.0+cu102.html
Usage
Data Preparation
We follow HPLFlowNet to prepare FlyingThings3D and KITTI datasets. Please refer to repo. Make sure the project structure look like this:
PV-RAFT/
data/
FlyingThings3D_subset_processed_35m/
kitti_processed/
data_preprocess/
datasets/
experiments/
model/
modules/
tools/
After downloading datasets, we need to preprocess them.
FlyingThings3D Dataset
python process_flyingthings3d_subset.py --raw_data_path=path_src/FlyingThings3D_subset --save_path=path_dst/FlyingThings3D_subset_processed_35m