Variational Relational Point Completion Network
VRCNet
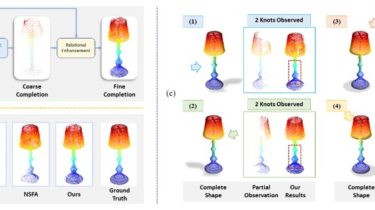
Real-scanned point clouds are often incomplete due to viewpoint, occlusion, and noise. Existing point cloud completion methods tend to generate global shape skeletons and hence lack fine local details. Furthermore, they mostly learn a deterministic partial-to-complete mapping, but overlook structural relations in man-made objects. To tackle these challenges, this paper proposes a variational framework, Variational Relational point Completion network (VRCNet) with two appealing properties: 1) Probabilistic Modeling. In particular, we propose a dual-path architecture to enable principled probabilistic modeling across partial and complete clouds. One path consumes complete point clouds for reconstruction by learning a point VAE. The other path generates complete shapes for partial point clouds, whose embedded distribution is guided by distribution obtained from the reconstruction path during training. 2) Relational Enhancement. Specifically, we carefully design