A fast and robust LiDAR point cloud panoptic segmentation framework

Panoptic-PolarNet
This is the official implementation of Panoptic-PolarNet.
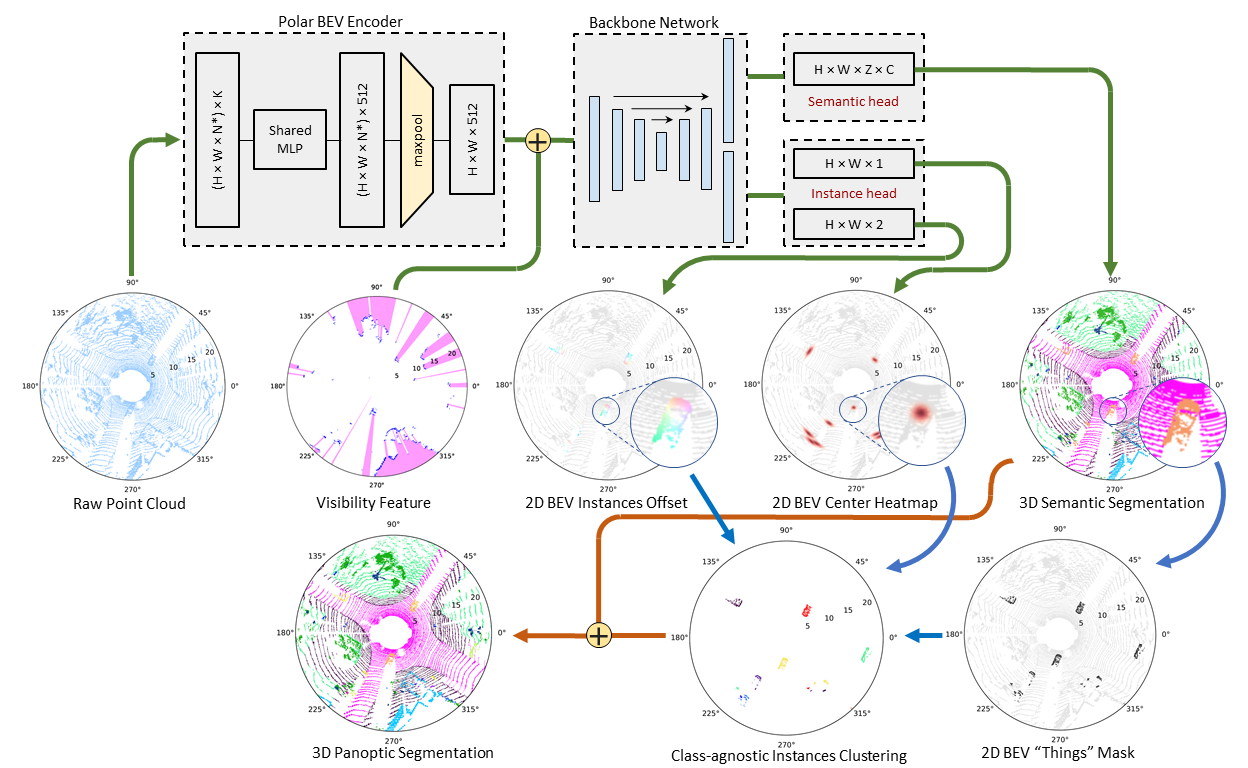
Panoptic-PolarNet is a fast and robust LiDAR point cloud panoptic segmentation framework. We learn both semantic segmentation and class-agnostic instance clustering in a single inference network using a polar Bird’s Eye View (BEV) representation. Predictions from the semantic and instance head are then fused through a majority voting to create the final panopticsegmentation.
We test Panoptic-PolarNet on SemanticKITTI and nuScenes datasets. Experiment shows that Panoptic-PolarNet reaches state-of-the-art performances with a real-time inference speed.

Prepare dataset and environment
This code is tested on Ubuntu 16.04 with Python 3.8, CUDA 10.2 and Pytorch 1.7.0.
1, Install the following dependencies by either pip install -r requirements.txt or manual installation.
2, Download Velodyne point clouds and label data